May 15-17, 2015
The project was received really well at Maker Faire. Here’s a post Faire team picture. Note the two Editor’s Choice ribbons attached to the frame:

We had a large space just to the West of Expo Hall:

The team did demonstrations every half hour, most of which drew hundreds of people at a time:

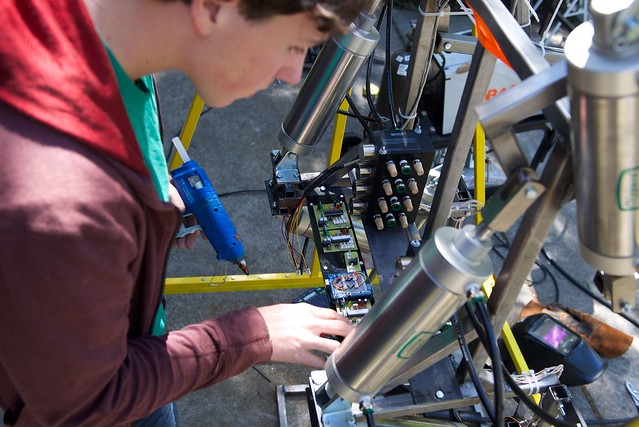
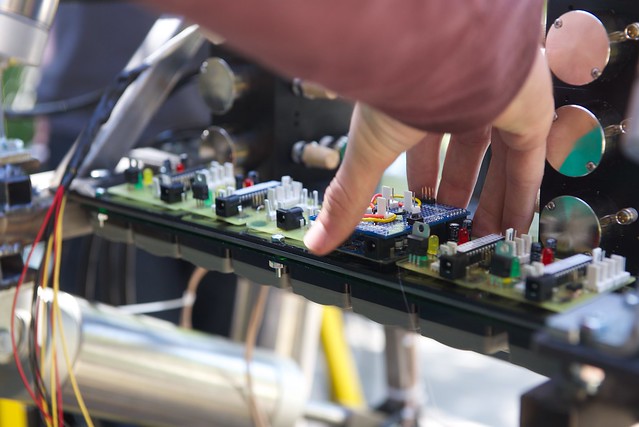
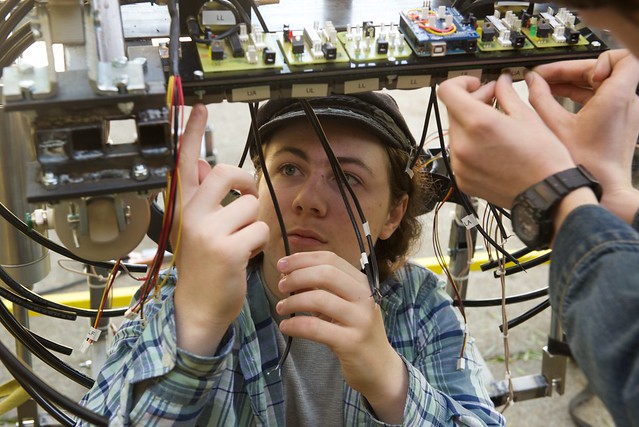
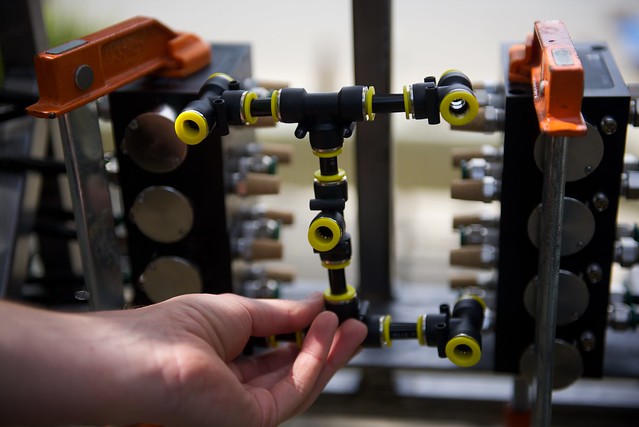
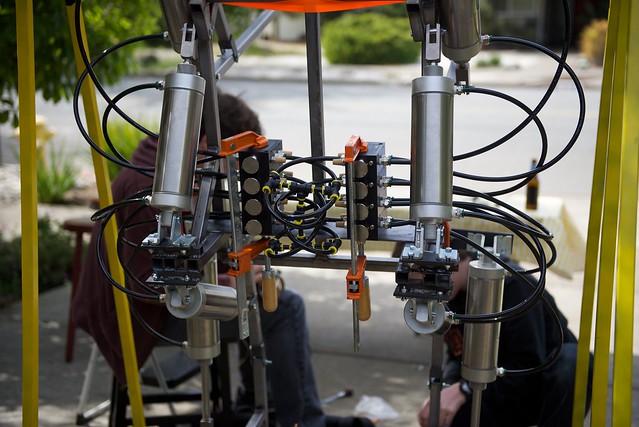
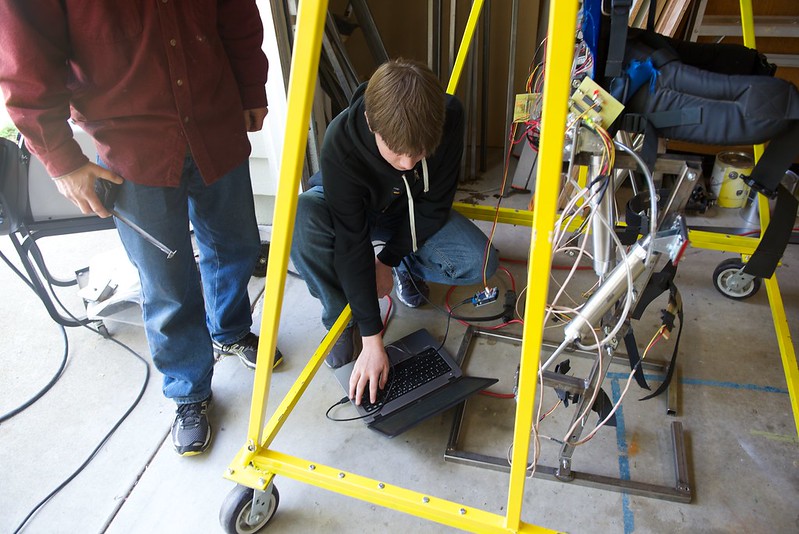
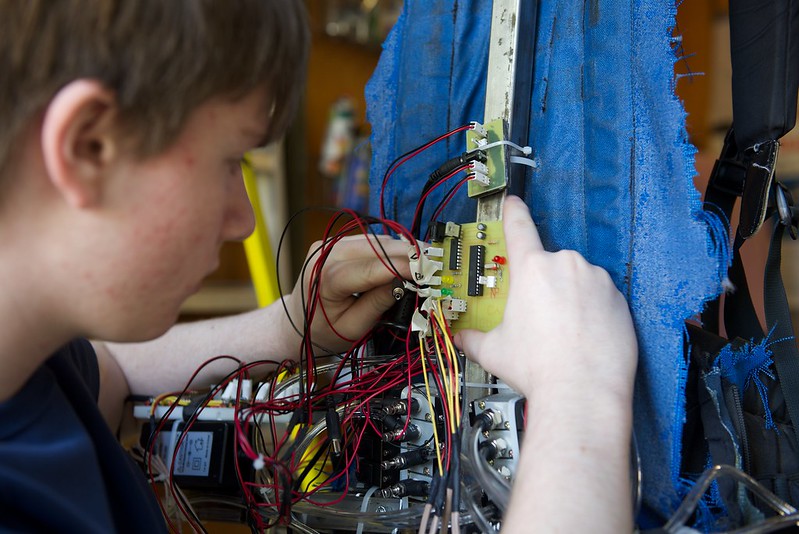
We invited people to come around to the back of the suit to see “where the magic happens”:
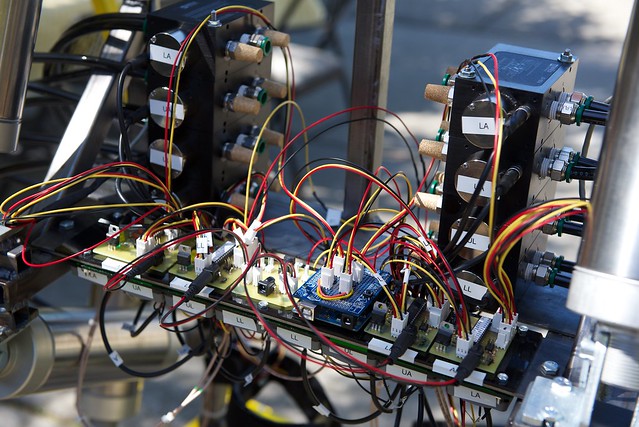
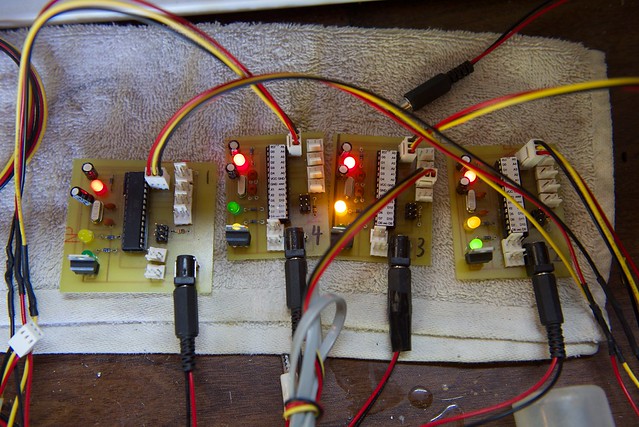
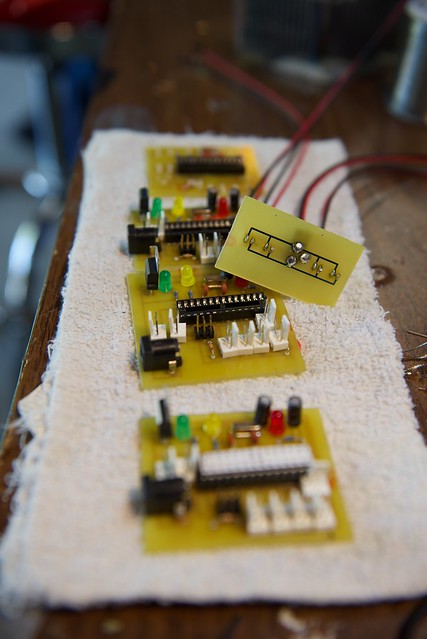
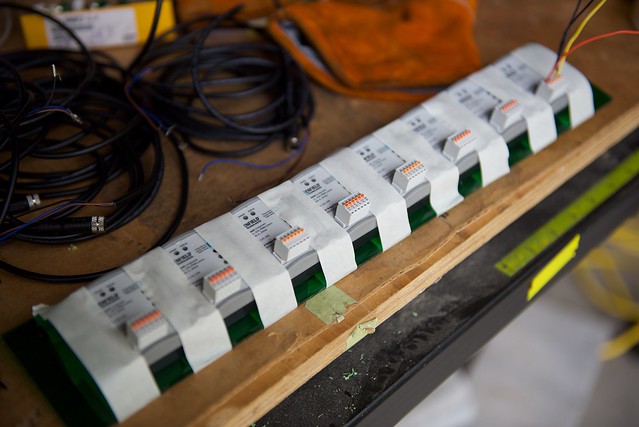
The control system consisting of 4 custom Arduino boards, one Arduino Uno, and Enfield proportional valves and controllers.
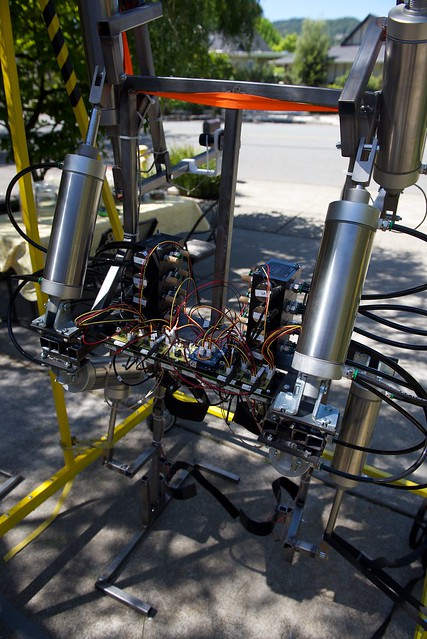
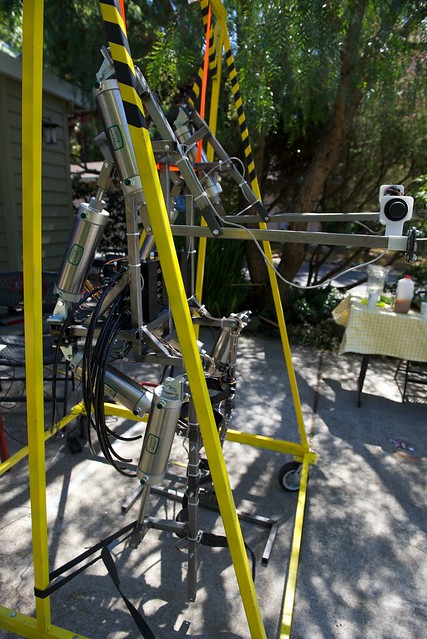
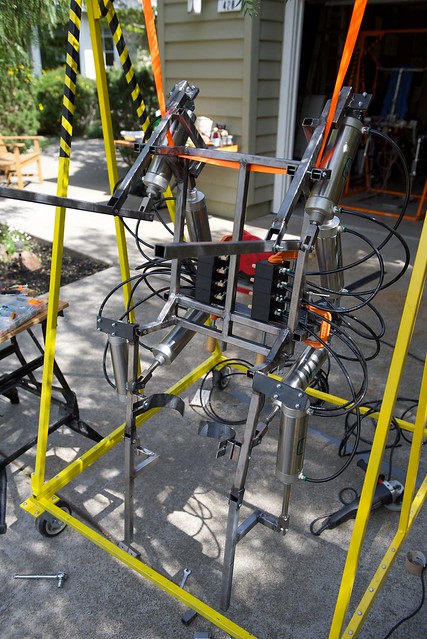
We were able to do lifting tests of up to 100lbs per arm, and we demonstrated how the force sensors control motion of the legs. We are still working on the software for walking, so we weren’t able to get the suit to leave the support frame (the yellow structure at the center of the image above).
There were almost continuous press interviews during the weekend.

Gabriel, Thelonious, and Cole being interviewed for the Popular Science video.
A few highlights: The Exosuit was the lead story in Re/Code’s article on Maker Faire. Business Insider also did a nice piece on the project, and Popular Science in collaboration with portico.tv featured the Exosuit in their Maker Faire report (click on the Popular Science logo to view the video; the Exosuit is introduced around 7:40).
Here’s one of our favorite pictures from the weekend. The guy in the baseball cap is Carl Bass, CEO of Autodesk, and the fellow to his left is Larry Page, CEO of Google. To have them both at the booth at the same time, with big smiles on their faces was just amazing.

A couple of other memorable stories: An MIT recruiter said she was blown away by the project. It’s the sort of thing they expect from their graduate students, not high schoolers. A quite a few people said they thought the Exosuit was the best thing they saw at the Faire, including a planetary scientist from NASA. We found out from her that exoskeletons will play a big role in planetary exploration because the space suits are so heavy that even on low gravity planets like Mars that the astronauts will need strength assist.
All in all an unforgettable experience for the team. We couldn’t have done it without you and our other sponsors (Autodesk, Enfield Technologies, Clippard, Perforce, Not Impossible)!